Appearance
欢迎使用 AI Vision
产品介绍
AI Vision Sensor 是一款面向 LEGO 教育与创客 的智能视觉传感器,内置 9 大 AI 模型,支持:
- 物体检测(80种类)
- 高级分类(返回坐标)
- 人脸识别
- 文字与数字识别
- 姿态检测
- 二维码 / 条形码
- 颜色识别
- 物体追踪
- 巡线
它不仅可通过 Scratch 编程界面让孩子们从小学起轻松上手,还能无缝对接 LEGO Spike、EV3、Arduino、micro:bit 等主流控制器,轻松融入创客与教育场景,做到软硬件结合,寓教于乐。
技术规格
| 参数 | 说明 |
|---|---|
| 处理器 | RV1106G3,1.2GHz 1TOPS NPU算力 |
| BLE&WiFi | ESP32-C3 |
| 摄像头 | 300W,低光照摄像头,焦距可调节 |
| 供电电压 | 5.0V |
| 电流消耗 | 峰值约 300mA @ 5.0V; 关闭wifi,峰值约200mA @ 5.0V |
| 连接接口 | SPIKE, EV3, UART, I2C, GPIO |
| 内置功能 | 物体检测 / 分类 / 文字数字识别 / 人脸检测 / 目标跟踪 / 姿态检测 / 二维码&条码 / 颜色检测 / 巡线 |
| 尺寸 | 66mm × 29.5mm |
| 电池 | 3.7V 锂电池,1800mAh,续航约 4 小时(电池版支持) |
软件下载
加载中...
电源供电
电池版本
- USB供电:USB 供电时会自动充电; 充电时,rgb灯变红色,充满时变绿色
- 接口供电:参考接口说明章节引脚num,其中3和5脚都可供电
- 电池供电:插入 LEGO 主机时,电池自动供电,可在软件中设置优先模式
- 多方式并行:支持 USB + 接口 + 电池同时接入
普通版本
- USB供电
- 接口供电
- 两者可并行供电
⚠️ 注意
- 请保证电源电压与功率足够,否则可能导致设备异常。
- 电池供电优先选择,目前只会切换接口引脚3的供电,引脚5的供电无法切换
接口说明
LEGO Spike(45678) / 51515/ EV3
- 需购买专用连接线
- Spike&51515:作为超声波传感器方式接入,目前SPIKE支持的功能,51515都支持
- EV3:插入 1/2/3/4 输入端口
UART
| 引脚 | 功能 |
|---|---|
| 1 | TX(发送) |
| 2 | RX(接收) |
| 3 | VCC(电平供电,3.3V 或 5V) |
| 4 | GND |
| 5 | 5V 电源输入(若 3 脚为 5V 可不接) |
| 6 | NC 不接 |
I2C
| 引脚 | 功能 |
|---|---|
| 1 | SDA(数据) |
| 2 | SCL(时钟) |
| 3 | VCC(电平供电,3.3V 或 5V) |
| 4 | GND |
| 5 | 5V 电源输入(若 3 脚为 5V 可不接) |
| 6 | NC 不接 |
GPIO
| 引脚 | 功能 |
|---|---|
| 1 | IO口(可设置高低电平,高电平电压和3引脚一致) |
| 2 | IO口(可设置高低电平,高电平电压和3引脚一致) |
| 3 | VCC(电平供电,3.3V 或 5V) |
| 4 | GND |
| 5 | 5V 电源输入(若 3 脚为 5V 可不接) |
| 6 | NC 不接 |
⚠️ 注意
引脚3需要根据外接的TTL电平来确定,如果外接UART或I2C接口TTL电平是3.3V,那么就接3.3V,如果外接TTL电平时5V,那么就接5V。 当接入是5V时,也可以给系统供电,所以5引脚可以不接;否则必须在5脚接入5V
参考图,如下图放置时,由上到下分别时1,2,3,4,5,6引脚 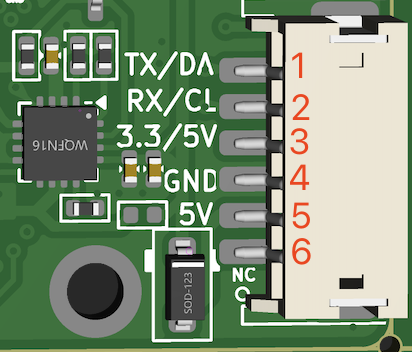
连接使用
设备连接

- 点击红色蓝牙按钮 → 扫描设备(默认名称
visible-sensor) - 输入密码(默认
000000) → 成功后按钮变绿 - 点击绿色按钮即可断开
修改设备名称

修改后需等待 约 3 小时, 操作系统缓存刷新后才生效。
TIP
建议首次连接后立即修改设备名称,方便区分。
模型训练
支持云端模型训练, 训练完成后的模型再上传到设备使用。 功能目前暂未开放
模型配置
分类(高级分类)
- 上传图片/视频并框选物体,命名后即可识别
- 返回坐标(部分分类识别不了位置,X1,Y1返回
(0,0)) - 最大支持 10 类
📝 与检测的区别是:
- 检测目前只支持80种类别,并且同一类别的不同形态的物体会检测到同一类型,比如杯子,不同的杯子检测的结果都是杯子,而高级分类可以分别上传不同的杯子进行配置,从而检测到不同的杯子。
- 如果需要检测80种以外的物体,检测需要进行云端训练才能识别,高级分类直接上传图片配置即可。
- 检测优点也很明显,经过训练的模型对特定物体的检测即精准又高效。
人脸
- 支持上传 / 框选方式配置
- 可修改名称
- 最大支持 10 张
跟踪
- 仅支持 1 个目标, 最多上传5张照片,分别对应一个目标的不同方向,名称需要保持一致
颜色
- 系统内置:红、橙、黄、绿、青、蓝、紫
- 可自定义纯色目标,如果有设置自定义颜色,那么系统的颜色将不生效。
- 最大支持 10 种
巡线
- 仅支持黑色线条
Wi-Fi 设置
- 路由器模式:连接 2.4G Wi-Fi,与 PC 端同网段
- AP 模式:设备热点,名称与设备名一致,PC连接热点后,将无法连网
⚠️ 建议
优先使用路由器模式,AP 模式仅在信号弱时使用。
高级设置
- 接口协议:支持 spike、ev3、uart、i2c。 使用方法参考Lego使用、UART&I2C使用、GPIO使用
- 供电模式(电池版):优先外部 / 优先电池,电源切换设备运行不会中断
- RGB灯亮度:调节亮度(0-100),设置为0时,关闭rgb灯
- 开启照明灯:RGB灯作为照明灯使用。设备重启后,设置失效
- 蓝牙密码:六位数字,默认
000000 - 分辨率:800×480 / 1072×640
- 恢复出厂设置:清空所有配置与所有的模型配置
设备信息
展示 App 版本、固件版本、MAC 地址 等信息。
最下方可选择新版本并点击 升级 按钮进行 OTA 升级。
忘记密码
当忘记蓝牙连接密码时,使用此功能进行密码重置。
根据 App 提示进行操作,重置成功后,密码恢复为000000
编程界面
右键点击(平板长按)
code1,弹出对话框,包括:新建、复制、重命名、删除。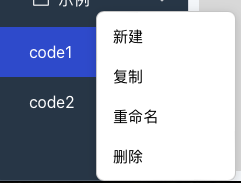
界面布局说明
- 右上方:显示视频
- 右下方:显示日志
- 显示区域可通过拖动分界条调整大小
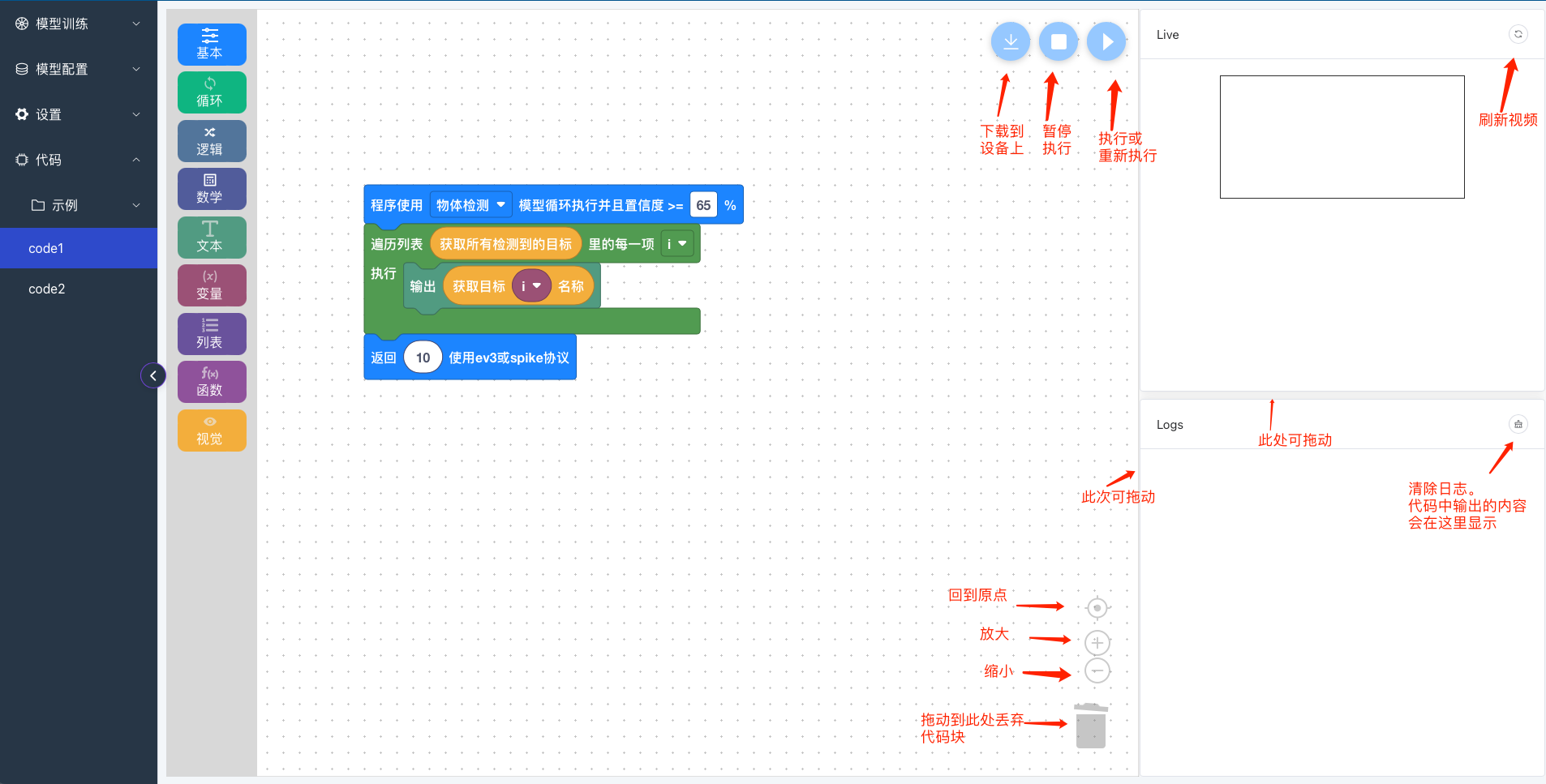
⚠️ 注意
如果有不用的代码块,请全部删除,否则不能提交!
显示日志有限流,并不是每帧数据都打印,
字节数 [0, 50] 10次/s, 字节数 [50, 100] 5次/s, 字节数 [100, 500] 2次/s, 字节数 [500, 1000] 1次/s。超过1000截断,只打印前1000个字符
其他功能
代码导入导出
- 可选择 导入/导出代码
- 保存文件格式:
.bin - 一般情况下导出到下载文件夹
语言切换
目前支持 中文 / English
编程块使用
基本(Basic)
一些最常用的基础积木。
程序使用指定模型循环执行...
- 用法:程序必须以此积木开始,并指定一种模型类别和对应的置信度。
设置模型类别和置信度
- 用法:在程序运行过程中,可以动态修改模型类别和置信度。
等待
- 用法:让程序进入睡眠状态。
⚠️ 注意
不要等待太久,以免程序一直处于 sleep 状态,导致无法执行其他操作。
接收到的命令
- 用法:
- SPIKE 在使用超声波时,可通过灯的形状来通知 AI Vision,AI Vision 通过此积木接收命令,实现由主机控制。
- EV3 接口无此功能。
- UART/I2C 也可通过发送命令实现类似效果。
EV3 & SPIKE 接口返回数据

- 用法:当协议为 EV3 或 SPIKE 时,请使用此积木进行返回。
⚠️ 注意
- 同步返回数值必须在 0–200 之间
- 当程序执行到这行指令后会立即返回,即不执行其他指令了。
- 建议在所有可能返回的分支返回数据。
UART & I2C 接口返回数据
用法:当协议为 UART 或 I2C 时,请使用此积木进行返回。
- 如果输入是 字符串,请使用
none转换:
- 如果输入是 object,请使用
json转换:
- 如果输入是 字符串,请使用
⚠️ 注意
当程序执行到这行指令后,会返回,也就是不执行其他指令了。建议在所有可能返回的分支返回数据。
视觉类(Vision)
与视觉检测、识别相关的积木。
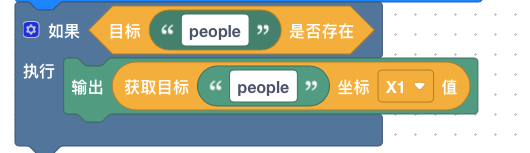
指定的目标是否存在
- 用法:判断一个指定名称的目标是否存在。存在返回 真,否则返回 假。
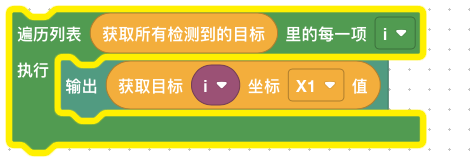
获取所有检测到的目标
用法:返回所有检测到的目标(list 列表),需循环遍历获取单个目标。
示例:

获取指定目标的坐标值
用法:输入目标名称或 object,返回目标矩形框的坐标值。
- 坐标值以图像左上角 (0,0) 为原点。
- 例如分辨率为 800×480,则右下角坐标为 (799,479)。
坐标说明:
- X1:矩形框左上角的 X 坐标
- Y1:矩形框左上角的 Y 坐标
- X2:矩形框右下角的 X 坐标
- Y2:矩形框右下角的 Y 坐标
用法示例:
- 使用目标名称
⚠️ 注意
如有多个同名目标,仅返回第一个
- 使用目标 object
获取指定目标的姿态位置的坐标值
用法:输入目标名称或 object,返回姿态点坐标(仅对姿态模型有效)。
- X:位置点的 X 坐标
- Y:位置点的 Y 坐标
示例:

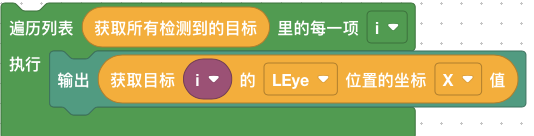
支持的姿态点:
Nose(鼻子)、LEye(左眼)、REye(右眼)、LEar(左耳)、REar(右耳)、
LShoulder(左肩)、RShoulder(右肩)、LElbow(左肘)、RElbow(右肘)、
LWrist(左手腕)、RWrist(右手腕)、LHip(左臀)、RHip(右臀)、
LKnee(左膝)、RKnee(右膝)
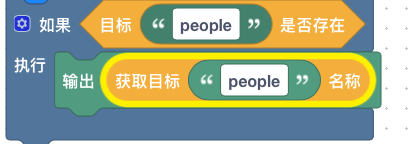
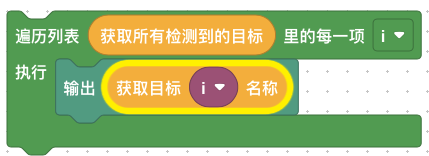
获取指定目标的名称
用法:输入目标名称或 object,返回目标名称(可能是模型默认或自定义配置)。
示例:
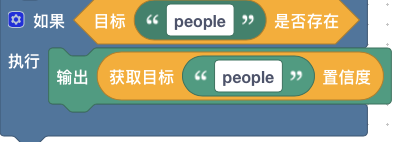
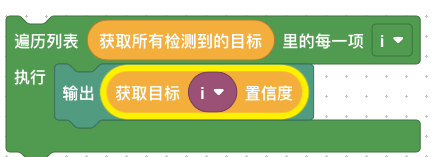
获取指定目标的置信度
用法:输入目标名称或 object,返回匹配目标的置信度(0–1 之间的小数,1 为最大)。
示例:
其他类
打开APP参考使用说明
Lego 使用
用于 SPIKE 与 EV3 的应用场景。
前置条件:必须在高级设置中选择接口协议为SPIKE或者EV3
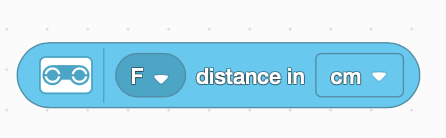
SPIKE 应用:获取 AI Vision 数据(单位必须为 cm)
SPIKE 应用:发送命令给 AI Vision
(如需查看接收值,可在 AI Vision 中使用输出命令打印)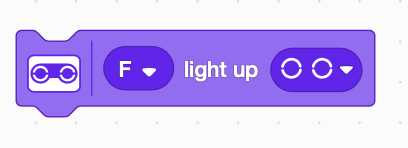
EV3 classroom 应用:
- 输入端口必须是 1, 2, 3, 4
- 单位必须为 cm

⚠️ 注意
LEGO 获取传感器数据的时候,总是会获取到最近一次收到的数据。例如如果有一帧数据发送了数据10,后面几帧数据都没有发送return数据,那么读取的数据会一直是10,直到下一次收到数据。所以在没有处理到数据的时候建议也发送return数据,以做区分
UART & I2C 使用
前置条件:必须在高级设置中选择接口协议为uart或者i2c
接收协议
c
// Byte[0] = 0x88, Byte[1] = 0xEE
// Byte[2-3] = 数据长度 (uint16, 小端),len = Byte[2] | Byte[3] << 8
// Byte[4..] = 数据内容,长度为len
// Byte[4+len] = CRC 校验数据,也就是Byte[4]开始,长度为len
uint8_t calc_crc(const uint8_t *data, size_t len) {
uint8_t crc = 0;
for (size_t i = 0; i < len; ++i) {
crc ^= data[i];
}
return crc;
}GPIO 使用
前置条件:必须在高级设置中选择接口协议为gpio
接收协议 使用ev3/spike返回数据的命令来设置高低电平, 数值对应如下: 0: 1和2引脚都为低电平 1: 1引脚为高电平,2引脚为低电平 2: 1引脚为低电平,2引脚为高电平 3: 1引脚为高电平,2引脚为高电平
REQ
RGB灯颜色的作用
红色:电池充电中
绿色:电池充满电或者无电池正常状态
黄色:无摄像头扫描不到设备
优先拔掉设备电源,让设备重启。 如果还不行,重启APP。